Sensor Integration · Embedded Systems · Field Instrumentation
Overview
The goal was to design, build, calibrate, and deploy an autonomous underwater vehicle capable of measuring pressure, temperature, and pH as functions of depth near the Dana Point Pier — and to produce reliable, calibrated data from a real ocean environment.
This was my final project for Experimental Engineering (E80) at Harvey Mudd. Every subsystem — circuit design, firmware, calibration, and data processing — was designed from scratch. The project ran from initial sensor selection through full field deployment across 14 trials.
Key result: The pressure system successfully measured depth profiles to 3.5m with hydrostatic validation. Temperature and pH failures revealed specific, fixable implementation problems — not design errors.
The Problem
Ocean water chemistry changes with depth in ways that matter for coastal ecosystem health and ocean acidification monitoring. Pressure, temperature, and pH profiles reveal thermal stratification, mixing layers, and chemical gradients that surface measurements miss entirely.
The engineering challenge was to build a sensor system compact enough to deploy from a pier, accurate enough to produce meaningful data, and robust enough to survive saltwater — while keeping every sensor output within the Teensy microcontroller's 0–3.3V analog input range.
Sensor Selection
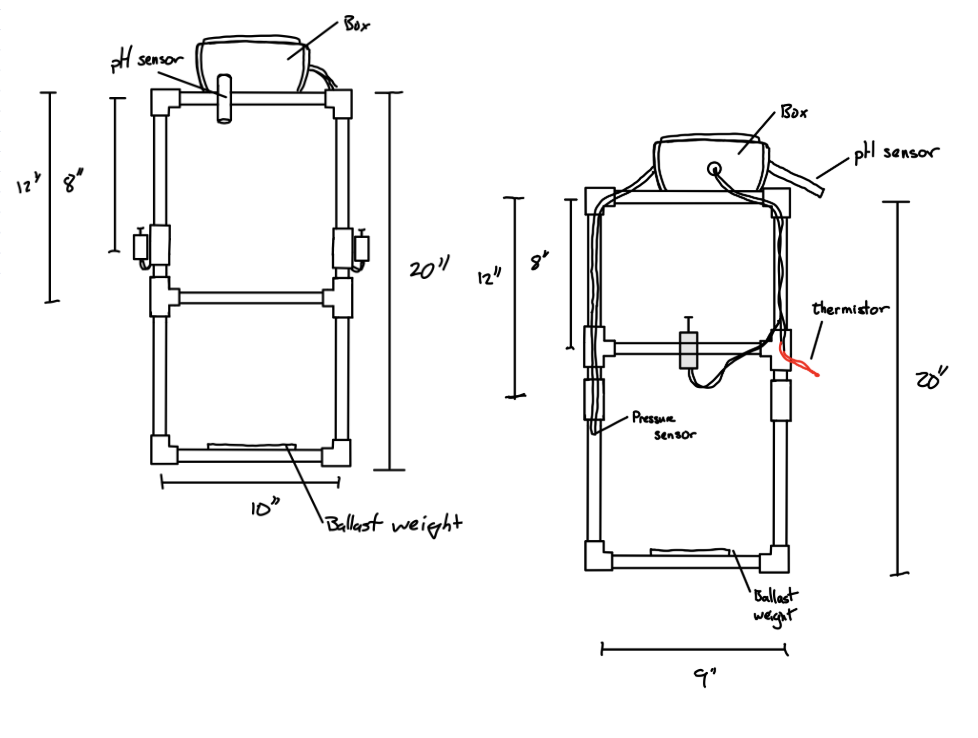
Chosen for its linear pressure-to-voltage output and the ability to remain inside a dry electronics enclosure while measuring external hydrostatic pressure through a tubing port. Keeps all electronics dry while transmitting real water pressure. The sensor's wide full-scale range meant only a small portion was used at the 2–4m deployment depths — requiring amplification and offset to resolve small depth changes.
Selected for temperature measurement via resistor-divider voltage conversion. ±1% resistance tolerance, B-constant of 4050 K, thermal time constant ≈4s. The narrow expected ocean temperature range meant the raw divider output covered only a small fraction of the ADC range — requiring amplification to improve resolution.
Measures hydrogen ion activity as a small voltage differential. The most electrically demanding sensor on the system: source impedances of 10 MΩ–1 GΩ require extremely high input impedance in the measurement circuit to avoid loading errors. The electrode also produces bipolar output, requiring voltage shifting before the ADC can record it.
Signal Conditioning Circuits
All three conditioning circuits used the MCP6002 op-amp — a single-supply, rail-to-rail device with 1.8–6V operating range, low input bias current (~1 pA at 25°C), and compatibility with the 5V battery supply.
Each circuit followed a two-stage architecture: a unity-gain buffer to isolate the sensor from downstream loading, followed by an offset-amplifier stage to scale the signal into the Teensy's 0–3.3V ADC window.
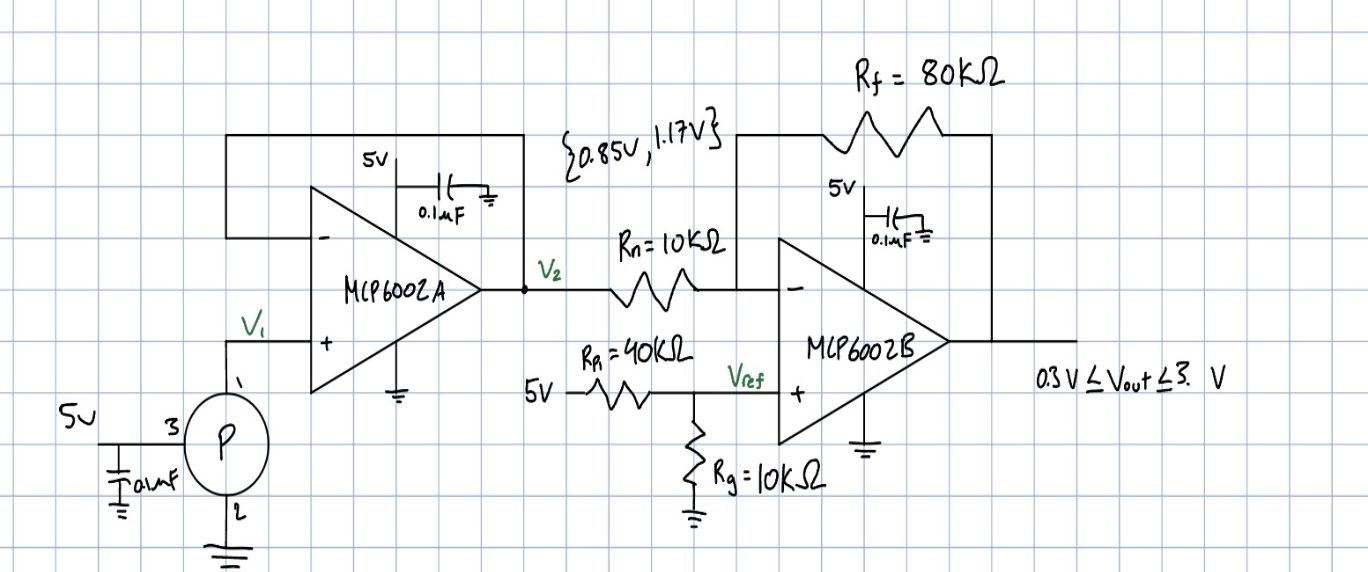
Pressure sensor conditioning circuit
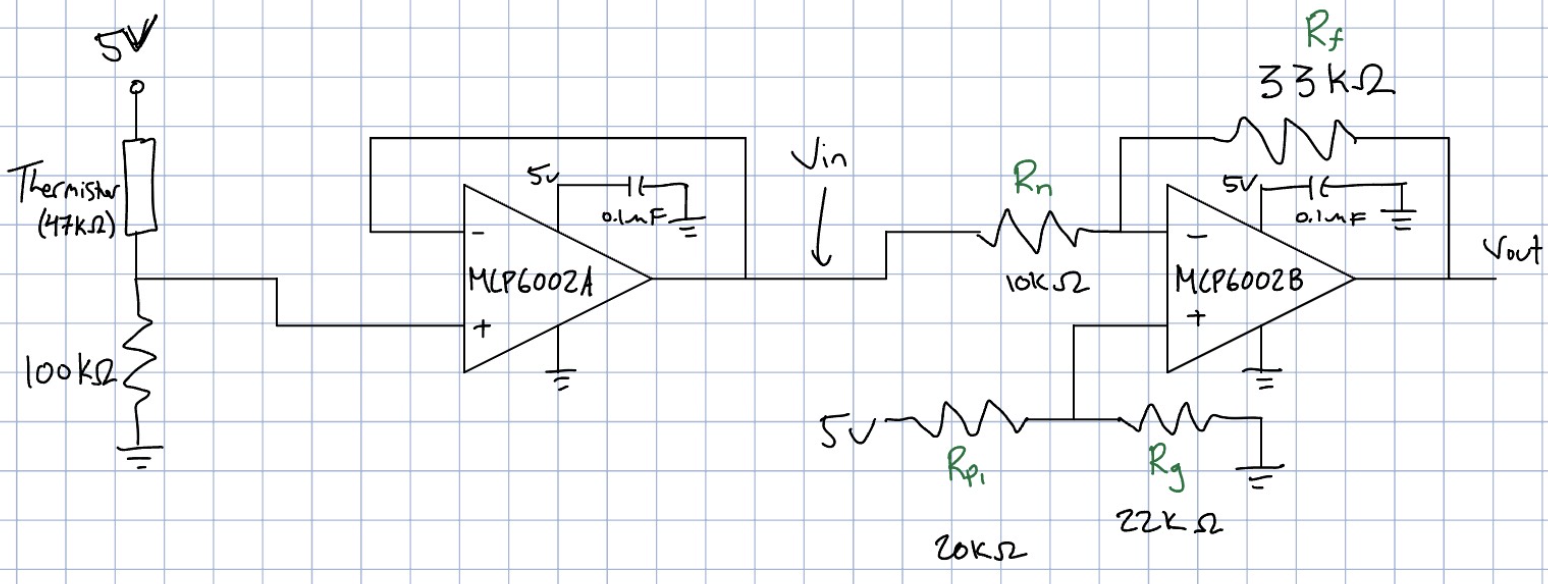
Thermistor conditioning circuit
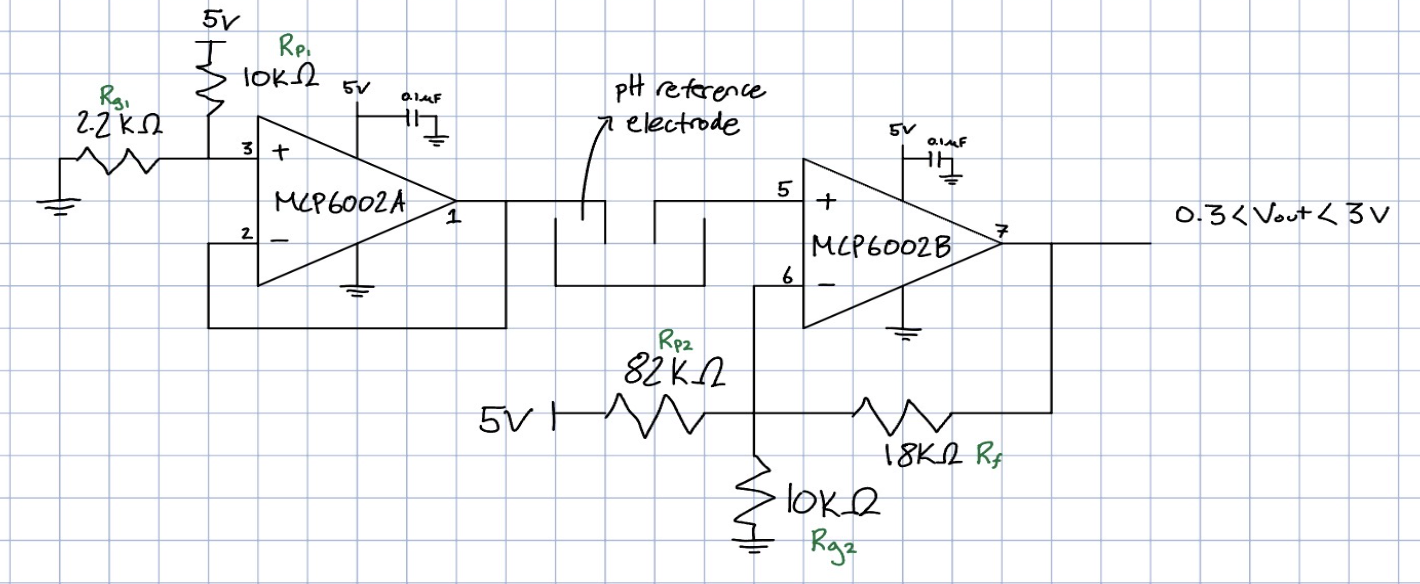
pH electrode conditioning circuit
Firmware & Data Pipeline
The Teensy microcontroller sampled all three sensor channels simultaneously at 10 Hz, storing timestamped voltage readings during each deployment trial. The 10 Hz rate was sufficient for all three sensors — pressure, temperature, and pH each change slowly relative to the sampling interval, and the thermistor's thermal time constant (~4s) is well within the 0.1s sample period.
Post-processing in MATLAB handled calibration curve fitting, voltage-to-physical-quantity conversion, and depth-profile plot generation. Calibration was performed in controlled lab conditions — a temperature bath for the thermistor, known-pressure references for the pressure sensor — and recalibrated at Dana Point immediately before the final deployment to account for local conditions.
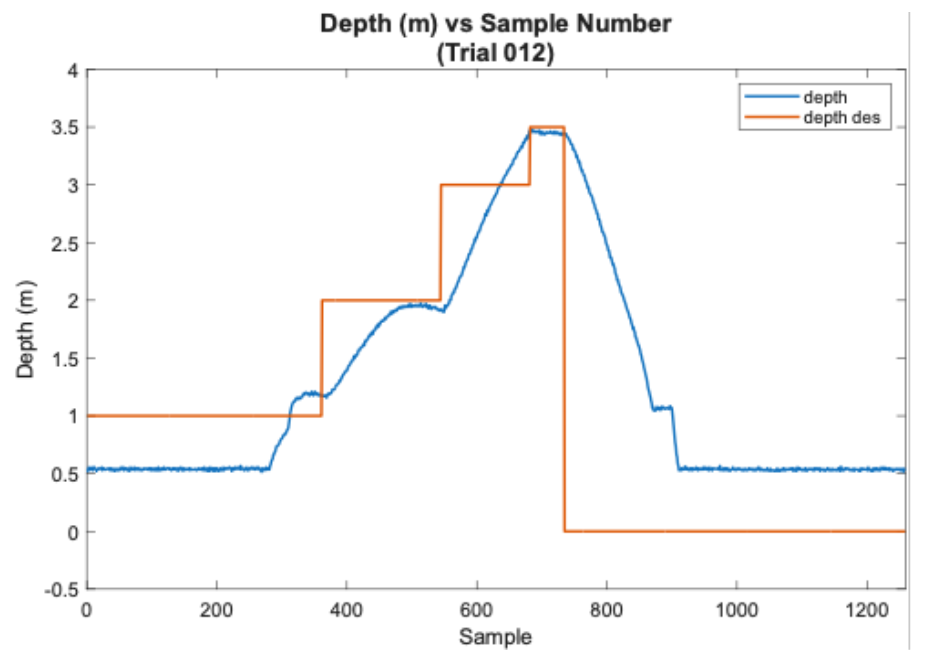
Pressure vs. depth — Trial 012, Dana Point Pier
Field Results
Fourteen deployment trials were conducted at Dana Point Pier. Trial 012 was selected for detailed analysis as the most representative of the final system's behavior.
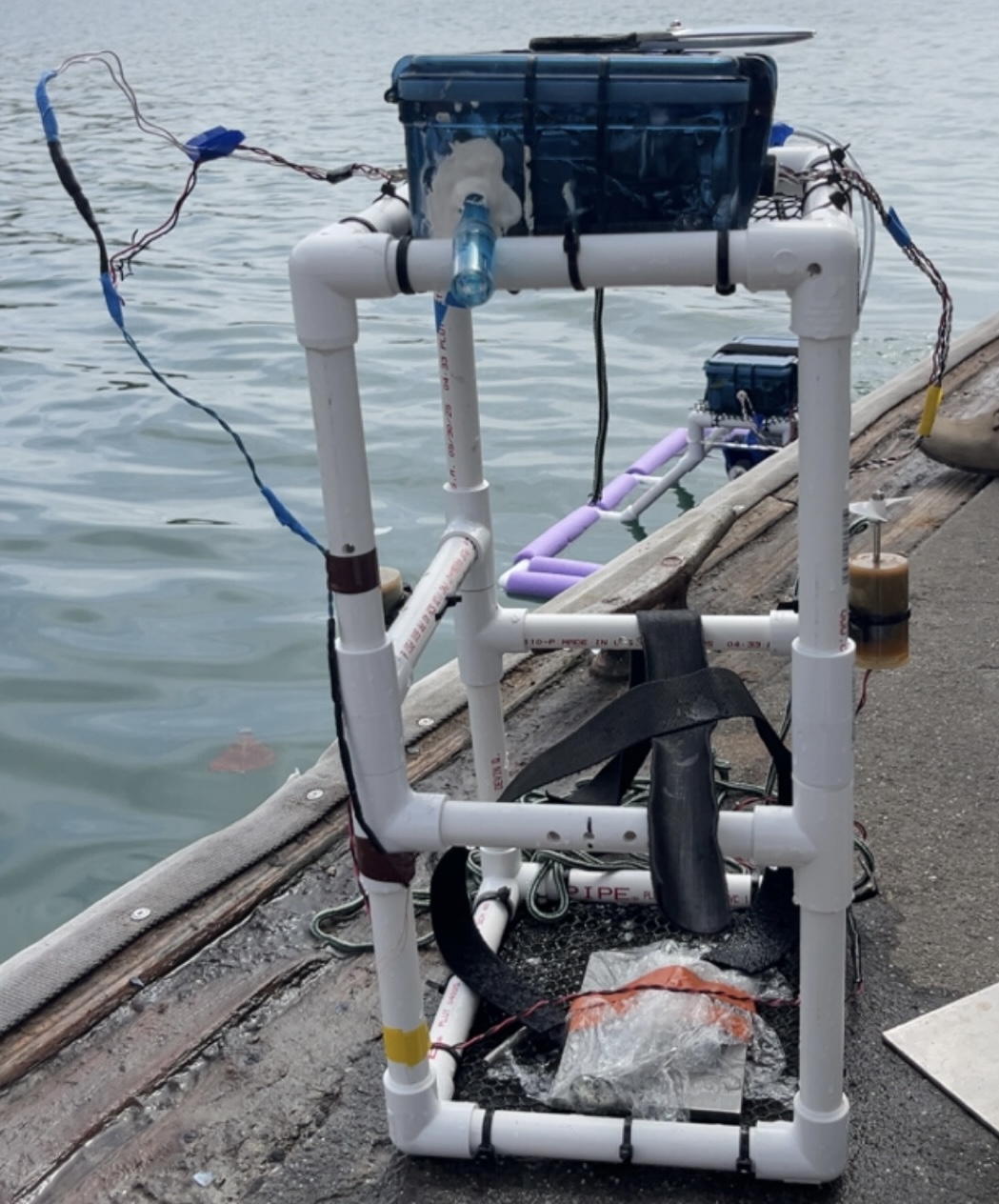
AUV at Dana Point Pier
Measured a maximum depth of approximately 3.5m with consistent, repeatable results across trials. The expected linear pressure-depth relationship was observed. Hydrostatic pressure validation confirmed the calibration was accurate for the deployment range.
Worked correctly during laboratory temperature-bath calibration. Failed in the field when saltwater shorted the thermistor wiring, producing unreliable readings. A waterproofing failure — the circuit design itself was validated in lab conditions.
Output dropped below the measurable range during ocean testing. Most likely cause: the extreme source impedance of the glass electrode (up to 1 GΩ) overloaded the MCP6002's input stage in the high-conductivity saltwater environment. The MCP6002 is a general-purpose op-amp, not an electrometer-grade front end.
Lessons & Next Steps
The pressure system validated the core instrumentation approach. The temperature and pH failures were both solvable, specific problems — neither required rethinking the fundamental design.